|
If everything comes to nothing, here we must
remain...
| In general if an object is not accelerated, either in
translation or rotation, the object is said to be in equilibrium.
Equilibrium comes in two flavors, static equilibrium and dynamic
equilibrium. If an object is not moving in our reference frame it
is in static equilibrium. If it is moving with constant velocity,
both linear and angular, it is in dynamic equilibrium. In this
course we are going to focus on static equilibrium. Static
equilibrium principles are of most interest to folks who want to
determine that their structures are going to stay where they put
them. This is an important point for architects, civil engineers,
mechanical engineers and carpenters.
If there is a net force, F, on an object of mass m, it
will be given an acceleration a = F/m. If there is
a net torque, t, on an object of
moment of inertia I, about any origin we may choose, it will be
given an angular acceleration a =
t/I. The null acceleration definition
of equilibrium above means that there are two necessary
conditions for equilibrium. The vector sum of all forces must be
zero and the vector sum of all torques must be zero. In the
special case of static equilibrium, the velocity of the center of
mass is also zero, as is the angular velocity. This equilibrium
notion is just a different slant on Newton's first law.
Since both forces and torques are vectors in up to three
dimensions each, the conditions that forces and torques add up to
zero in general involves six independent scalar equations. If
several force and torque vectors are applied to an object the
resulting expressions can get too messy to handle. To convey the
ideas without getting bogged down in the math we will work with
the situation where the forces all lie in the (x,y) plane. Many
real equilibrium problems may be expressed in terms of coplanar
vectors of this sort. With this restriction there are only three
equations to deal with, one in x, one in y and one in
q.
The business about the zero torque condition being true for
any origin refers to the fact that torque is defined always
relative to some point. The zero torque condition must hold for
any point in the (x,y) plane chosen as the origin for torque
determinations.
|
 |
 |
If an object may be treated as a particle there is no
possibility of it rotating so there is only one condition for
equilibrium. It must experience no translational acceleration.
This is not a very interesting situation, having a particle just
lying there, doing nothing, so we will be working with rigid
objects that have some noticeable size.
In particular, for now, we will be working with a disk about
30 centimeters in diameter with attachment points around the edge
and a mass of 2.25 kg. We will pull on it, try to spin it and
generally give it a hard time as we explore the idea of static
equilibrium.
Consider the effect of a force, F, applied straight up the
y-axis at the top of a solid disk, by pulling straight up on a
pin attached near the edge of the disk. In the absence of any
other forces, the disk will accelerate up the y-axis such that
d2y/dt2=F/m, where m is the mass of the
disk. Pretty clearly this apparatus is not in static equilibrium.
In fact in a short time it would disappear off the top of the
display, never to be seen again.
Since we are working with a mathematical model rather than
reality itself, it is not difficult for us to ride along in the
reference frame in which the disk remains at rest. Of course such
an accelerated reference frame is not inertial. Being in a
non-inertial reference frame, we find that unexplained forces
crop up. To us it seems that everything, including the disk
itself is being pulled in the negative y direction such that
anything of mass m has weight F. This works out nicely to provide
the reaction force against the pin required by Newton's third
law.
According to Newton's third law, the reaction force the disk
applies to the pin is equal in magnitude and opposite in
direction to the applied force. This reaction force is
transmitted by the inter-atomic forces in the disk material to
the pin from the center of mass of the disk where inertial forces
are manifest. The Flying Disk model,
illustrated at the left, deals with this situation.
|
| Fortunately we can avoid having to chase our disk at ever
increasing velocity in order to keep it under our observation.
The situation we observed when traveling along with the disk is
exactly that we find in a stationary laboratory in the presence
of a gravitational field. All we have to do is replace the label
on our inertial reaction force with weight. The Hanging Disk model reflects this change. It
was exactly the line of reasoning we just used that led Einstein
to the general theory of relativity. Since gravity is a major
player in static equilibrium problems I thought this little
digression might be good for us.
Notice that there is no such thing as a single force. Either
inertia or gravity kicks in an additional force applied at the
center of mass.
|
 |
 |
Now that we have our apparatus under control, let's consider
the effect of having the pin from which the disk hangs, not
directly over the center of mass. First some definitions. The
line of action of a force is a line containing the force vector
and extending as far a necessary in each direction. If two forces
have an equal effect on an object they are called "equivalent".
For two forces to be equivalent they must be equal in magnitude
and direction, and have the same line of action. This means that
the two forces may be applied at different points on an object
but both points must lie on the line of action of the forces.
Forces that share a common line of action may be added to get a
net effect
For a particle, if two equal and opposite forces were applied
they result in no acceleration. For two equal and opposite forces
to have no effect on an object of some size they must have the
same line of action. An example of forces that may be added to
get a net effect would be the applied force at the pin and the
weight of the disk in the Hanging
Disk model.
Even if forces are equal and opposite, if they do not share
the same line of action they will result in a torque, giving the
object an angular acceleration unless it is constrained. The
Pendulum Disk model illustrates this
situation. Notice that we display the distance between the line
of action of the applied force and the center of mass where the
weight acts. This distance is called the moment arm.
Two forces in opposite directions, not sharing the same line
of action are called a force "couple". If the disk were free to
pivot about the pin it would initially swing counterclockwise in
this example with a pendulum like motion.
|
| Now let's alter the apparatus a bit. Imagine our disk, lying
on a heavy table and fastened to the table by a pin through the
center of the disk. Suppose we have the means to attach a cord to
any point we wish on the disk and apply a force by pulling on the
cord. The Tugged Disk model allows you
to determine both the radial force and the torque that would have
to be provided by the central pin to maintain static equilibrium.
The algebraic sign of the torque indicates the direction of
the torque vector. Remember that torque is a vector quantity with
the vector perpendicular to the two vectors from which it is
calculated. In this instance the torque is the cross product of
the attachment offset vector and the applied force, t=AOXAF. This makes torque
point in the z direction, which is awkward for us to display in a
2D model. It turns out that it is more awkward to manipulate the
vector magnitude and direction on a 3D model so we are working in
2D where a negative torque indicates that the torque vector
points into the screen and a positive torque points out of the
screen.
|
 |
 |
We have made the point that an object cannot be subject to a
single force and that an object subject to two forces can only be
in equilibrium if the forces are equal and opposite and have a
common line of action. For an object subject to three forces to
be in equilibrium, the sum of the three forces must be zero and
their lines of action must intersect in a single point or not at
all. Forces that meet this condition for equilibrium are said to
be "concurrent". Let's leave our disk lying flat on our
frictionless table and remove the restraining central pin used in
the previous model. Now we will attach two applied forces to the
disk and calculate the magnitude, direction and attachment point
for reaction force that would maintain static equilibrium.
In the Three Force Equilibrium model
we start with a nice symmetrical pair of applied forces and the
reaction force to balance them into static equilibrium. You will
notice on the three-force equilibrium model that the lines of
action of the three vectors are shown to help you locate the
intersection. Once set, the attachment points for the applied
forces remain fixed. The magnitude and direction of the applied
forces may be adjusted. As you change the magnitude and direction
of the applied force vectors, you will see the magnitude,
direction and attachment point of the reaction force vector
change as required for static equilibrium change.
|
| Is it necessary to calculate the torque about a point where a
force is applied? Well...no. We saw in the three-force
equilibrium model that the torques were calculated about the
center of mass, even when none of the force vectors were attached
there. There is an advantage though in choosing the axis about
which to calculate the torque to be the point of application of
one of the forces. In that case, one of the moment arms is
automatically zero and the torque calculation only need be done
for the other forces. Any axis choice will yield the same net
torque, even an axis not in the disk at all.
Regardless on the number of forces acting on an object, if the
object is in translational equilibrium and the net torque is zero
relative to one point, then the net torque must be zero relative
to any point within the boundaries of the object or outside. The
reason this works is as follows.
The first condition requires that the vector sum of the
applied forces must be zero so we have:
Equation 1) SinFi = 0
Let the point O be that about which the net torque is zero and
let r1, r2,
r3...rn point to the
locations where F1, F2,
F3...Fn are applied to the
object, relative to the point O. Now if we pick any other point C
and let the vector rc point to the location of
C relative to O, then r1-rc
is the vector pointing to the application point of
F1 from the point C, and so on for the other
applied forces. Since the torque about O is zero, we have:
Equation 2) Sinri
XFi = 0
The torque about the point C is:
Equation 3) Sin
(ri-rc) XFi
= 0
Carrying out the multiplication in Eq3 we get:
Equation 4) Sinri
XFi - rcX SinFi = 0
But we know from Eq 1 that:
SinFi =
0
so the last term in Equation 4 vanishes, leaving the torque about
C equal to the torque about O, zero in both cases.
So if an object is in translational equilibrium and the net
torque about any point is zero, it is also zero about any other
point. This is a useful fact that allows us to choose the point
about which to calculate torques in equilibrium situations so as
to minimize our aggravation with the math.
You may experiment with different choices for the torque axis
on the Torque Axis Offset model. The model
is similar to the three-force equilibrium model but you may
select a new location for the torque axis by holding down the Alt
key while you click the mouse. Notice that the torque values may
change when the torque axis is moved, but the T1, T2 and TR still
add up to zero.
|
 |
 |
Natural structures, as opposed to living and human-made
objects, are good at handling compressive forces but poor at
handling tensile forces and torque. Nature usually solves her
static equilibrium problems by letting anything that is pulled or
twisted, fall down. Those structures that remain standing may be
impressive but they tend to be supported such that the parts are
in compression, like the pile of rocks seen here. We are not
content to get by with compressive forces in our structures so we
need to be more careful than mother nature in handling static
equilibrium problems.
In dealing with rigid objects near the surface of the planet,
one of the forces we must handle is that of gravity. Gravity acts
on an object as though all the object's weight was located at a
point called the "center of gravity". As long as an object is
small enough that there is no significant variation in the
gravitational field over the extent of the object, the center of
gravity coincides with the center of mass. For large structures
like tall buildings, we may have to be concerned with the
difference between the center of gravity and the center of mass.
For the kind of problems in introductory physics and engineering
courses it is not usually significant. Mostly your problems will
deal with small, symmetrical, uniform objects for which the
center of gravity can be found by simple geometry.
There is a recipe for solving static equilibrium problems.
Within the simplifications we have invoked it goes like this.
Make a sketch of the object involved. From the sketch draw a free
body diagram showing the approximate direction and magnitude of
all the forces acting on the object with the force vectors
attached at the point in the object where the forces are applied.
For this diagram you can usually represent the object by a simple
beam, or stick, to which you attach the vectors.
Resolve all the force vectors into horizontal and vertical
components and set the sum of all the horizontal(x) force
components to zero and the sum of all the vertical(y) force
components to zero. This leaves you with two equations, one in x
and one in y. You may get a third equation by setting the sum of
all torques, about a convenient torque axis, to zero. If in the
problem you have three or fewer unknowns, you may solve for them
by the simultaneous solution of the set of three equations. If
you have more than three unknowns the best you can hope for is to
get some relationships among them. In some problems this is
sufficient.
|
| You are going to have to know how to solve problems using the
recipe outlined above. It will be useful though to have a means
of experimenting with equilibrium to develop you intuition about
it. Also there will be times when all you want is the answer, not
practice in getting it. The equilibrium free-body model is an
engine for solving static equilibrium problems using the
computer's ability to do trial and error very quickly. We will
work through a few examples in detail, using this tool. Then you
can try setting up and solving some of the problems in your
textbook by this method.
The first example is a beam
balance. This model represents a rigid beam, resting on a
fulcrum at its center. In the initial setup there are some
weights placed on the beam. Load #1 is a weight of 3 units fixed
at the left end of the beam. Load #2 is a movable weight of 5
units initially located at the 25% position from the red end
toward the green end. We will refer to the ends of the beam by
their color spots since we may find the beam in any orientation.
The location of this movable weight is one of the system
variables to be found when we run the model. The reaction force
vector is located at the fulcrum and represents the force of the
fulcrum on the beam. Its direction is fixed upward but its
magnitude is the other system variable. The Weight vector is
attached at the beam center of gravity and points downward. Its
magnitude of course is fixed at the weight of the beam.
Clicking the Action button calculates the location of the
movable weight and magnitude of the reaction force that will keep
this system in static equilibrium. The results are reported on
the free-body diagram. This is a problem you could easily solve
by inspection. There is no left or right force. The total down
force is known and at equilibrium the total up force must be the
same. The reaction vector then must be i*0 + j*10.
Obviously we must place the movable weight on the other side of
the fulcrum such that the product of the weight times the
distance to the fulcrum is the same as on the left. That places
the movable weight 80% of the beam's length from the red marked
end.
|
 |
 |
The model is capable of handling more interesting examples. To
save you time, instead of building the subsequent models from the
beam balance we have pre-prepared separate models. The next
example uses a ladder leaned against a wall.
As loaded the Ladder model shows a
ladder of weight 2 whatevers leaned against a smooth wall at an
angle of 70 degrees. A rough floor supports the ladder. The
reaction force from the floor balances the weight of the ladder.
The friction between the ladder and the floor keeps the ladder
from sliding down the wall. The magnitudes of the reaction and
friction forces are unknown in this model. Initial values are
assigned to define the vector directions and so the vectors show
up on the free-body diagram. The actual values of the variables
will be calculated when you click the Action button. The
instructions on the model page will walk you through some
variations.
To find the equilibrium condition, the model first shifts any
movable forces to try to balance the system. If the maximum
available movement of any movable vectors leaves the system out
of equilibrium, then we go to work adjusting the remaining
variable forces.
The model will make every effort to find a set of vectors
consistent with those you defined, that result in static
equilibrium. It is up to you to determine if the resulting forces
make physical sense. In the ladder example for instance, you
could start with the ladder almost flat and come up with a
friction force many times the reaction force causing it. Unless
you imagine a coefficient of static friction much greater than
1.0, this would not work. The ladder would fall. If you turn the
ladder away from the wall (set a beam angle greater then 90
degrees), the solution will report the magnitude and direction of
forces required to hold it in place. If those forces are not
available, it will fall. Also you should be aware that the
solution might not be unique. The model will report the first
solution it comes up with, based on its internal logic. With
movable and variable forces, there may be alternative solutions
that work.
|
| For our last static equilibrium example, imagine a 20 foot
drawbridge attached to the castle wall at the left end with a
supporting cable attached at a point 3/4 of the way to the right
end, making a 45 degree angle with the bridge floor. The weight
of the bridge is 2 tons. A person on a unicycle bearing a 10-ton
load of rocking chairs on his back leaves the castle and pedals
across the drawbridge. What is the maximum tension in the
supporting cable? Where along the bridge should the guy pause
with his load so that the drawbridge fellow can most easily
replace the bolts that support the weight of the castle end of
the bridge?
Open the Drawbridge model and
follow the instructions on the model page to answer the
questions. This will complete this little discussion of static
equilibrium.
|
 |
 |
There is another topic to be covered that is not big enough
for its own section and has to fit in somewhere. Because of the
nice alliteration of "equilibrium and elasticity", and because if
an object is flexible in any sense, terrible complications arise
in static equilibrium, I decided to stick the discussion of
elasticity in this section of the course.
One of the assumptions made in our work so far with solid
objects was that the objects were rigid, meaning that they retain
their shape and dimensions when forces are applied to them. This
is only approximately true for any real object. All solids have
some degree of elasticity. The elastic modulus of a material is
defined as a ratio of the "stress" applied to the material to the
resulting "strain". Stress is the force per unit area applied to
a material and strain is the fractional change in size or
shape.
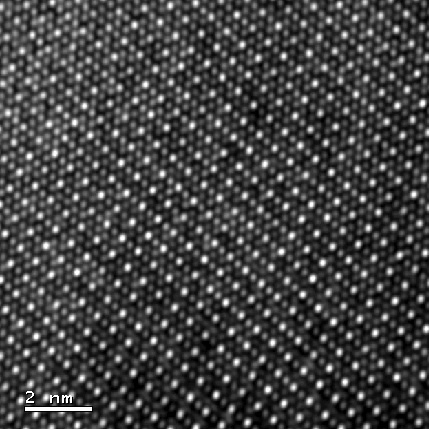
The origins of all elasticity in solid objects lie in the
arrangement of the atoms from which the object is made. Let's
limit ourselves in this introduction to objects made of metal
atoms or metal compounds. Normally such objects have regions,
large on an atomic scale in which the atoms are arranged neatly
in rows layers and blocks. This tidy arrangement is called
crystalline structure At the left is an actual picture from a
scanning transmission electron microscope at the University of
Michigan, showing the atomic arrangement in a crystal.
There is nothing mysterious about this well-ordered structure.
You can get a similar arrangement by pouring ball bearings into a
box. Gravity and the walls of the box try to minimize the
distance between the balls and their reluctance to share their
space with each other tends to hold them apart. In the case of
the atoms in a crystal there are similar forces of attraction and
repulsion. The forces in this case are electric in nature and
there are subtle but important differences between the force of
attraction and that of repulsion.
The repulsive force that holds atoms apart applies between
atoms of every sort. Once within a certain small distance, the
force of repulsion grows dramatically as the separation
decreases. The attractive force is strongest between atoms that
live together in the same crystal. It is less strong between
atoms that might live in the same crystal but do not. It is
weakest to non-existent between atoms that not only do not live
in the same crystal but also could not due to physical
differences. Such attractive force as does exist first increases
with increasing separation, then drops off quite steeply with
distance so that it is essentially zero beyond a few
nanometers.
|
| The interplay between the attractive and repulsive forces
results in a certain preferred separation between atoms in a
crystal. This preferred separation is the distance between atoms
when the crystal is unstressed. In three dimensions the resulting
crystalline structure might be represented by a collection of
balls and sticks where the balls represent the atoms and the
sticks represent the bonds that hold the atoms in place.
Now imagine pushing down on the top layer of atoms and with
equal force pushing upwards on the bottom layer. The stress
arising from these forces is called compressive stress. The force
holding the atoms apart gets stronger as the distance between the
layers decreases so the compressive stress results in a new
equilibrium separation with the layers slightly closer together
than before the application of the force. If the change in layer
separation from our compressive stress was 1e-11 meters, for
example, then the two layers nearest the middle would each move
in by 1e-11 meters. The two next layers then would each move in
by 2e-11 meters and so on so the total compression would be the
number of shifted layers times 1e-11 meters. If we had a 1-meter
long rod with this structure, imagine how many layers of atoms
there would be. Even very tiny changes in the separation of the
layers would accumulate over the length of the rod to be
noticeable on the macroscopic scale. In fact the fractional
change in the length of the rod would be equal to the fractional
change in the separation of the atomic layers.
As we compress the layers of atoms, there is a means for
stress to be relieved somewhat by the possibility for the atoms
to spread out slightly within the layers. If we were to press on
all six faces of the crystal simultaneously, as for example by
placing the crystal in a high-pressure fluid, this relief would
not be available and the strain in any one direction resulting
from the stress would be less.
|
 |
 |
OK... So what about pulling on the top and bottom layers of
this crystal, trying to increase the separation between layers.
First of all let's worry a bit about how you apply a pull as
opposed to a push. You can push on a crystal by bringing just any
old layer of strange atoms up close to the crystal. The universal
force of repulsion does the job. Given the nature of the
attractive force, pulling on anything with something else will
not work. There are no "pulls" between ordinary sized,
electrically neutral, physical objects. Only if we arrange things
so that we can push, can we apply a force between two different
objects. We can however imagine a pull on the little crystal
sample we have shown if it were part of a larger crystal
structure, the ends of which were formed so that we could get
behind a bulge at each end and push the ends apart, applying a
tension in the region at which we are looking. The stress
resulting from a pulling force is called tensile stress.
In that case, the applied stress acts to increase the
separation between the layers of atoms in our sample. Since we
are looking at part of a single crystal here, there is a
substantial attractive force available. But as the tension
increases, it is possible to exceed even the maximum attraction
and from then on, the attractive force decreases with distance.
If that tensile stress is reached, the sample comes apart at its
weakest point. Of course in a pure crystal with no irregularities
in the structure, no point is weaker than any other so the
tensile stress for failure, called the yield stress, of the
sample will be quite high. For tensile stress less than the yield
stress value, the layers of atoms find a new equilibrium
separation appropriate to the stress applied and once the stress
is removed the layers of atoms will return to their preferred
separation.
Again in this case, the atoms will arrange themselves so as to
minimize the interatomic stress and within a layer they will
shift slightly inward. This is visible on the macroscopic scale
as a slight decrease in diameter of our test rod with this
crystalline structure, as we stretch it.
|
| There is another way in which we might apply force to our
block of atoms. Suppose we push the top layer one way while
pushing the bottom layer the opposite way with equal force so
that overall equilibrium is maintained. This will try to increase
the distance between atoms by sliding the layers slightly,
relative to one another. The overall effect will be to change the
shape of our block, changing two of the faces from rectangles to
parallelograms. This shape changing stress is called shear
stress. The resulting strain is called shear strain. |
 |
|
 |
Most objects in the real world are not made of single large
crystals. They are composed of crystal fragments called grains,
each of which has an internal crystalline structure of the sort
we have been talking about. These grains are held together at
their boundaries by the medium strength bonds mentioned in the
discussion of the attractive force, the force between atoms that
could be part of the crystal structure but are not. So most
physical objects have only moderate yield stress, compared to the
theoretical maximum. There is an advantage in having objects made
up of crystal grains. In a single crystal, the strength depends
on the orientation of the stress relative to the crystal
structure. By having the object made up of crystal fragments
oriented randomly, the strength of the material is more
independent of the stress direction. |
|
The microscopic view of elastic behavior is useful for
understanding how materials respond to various stresses. It does
not, however, allow us to make quantitative predictions. To help
in that area, several quantities called collectively elastic
moduli have been defined.
The elastic modulus for length changes is called Young's
modulus. It is defined as tensile stress over tensile strain.
Y = (Force/Area)/(DL/L)
The tensile stress is the total stretching force divided by the
cross section area of the rod. The tensile strain is the increase
in length divided by the original length.
The elastic modulus for changes in volume is called the bulk
modulus. The bulk modulus is defined as the volume stress over
the volume strain.
B = - (Force/Area)/(DV/V)
The minus sign indicates a decrease in volume with an increase in
force. The volume stress is the normal force, per unit area of
the surface of the object. The volume strain is the change in
volume divided by the original volume. The bulk modulus applies
to liquids as well as solids.
The elastic modulus for changes in shape is called the shear
modulus. The shear modulus is defined as the shear stress over
the shear strain.
S = (Force/Area)/(Dx/h)
The shear stress, Force/Area is the tangential force per unit
area of the face where the force is applied. The shear strain is
the distance moved by the face receiving the force, divided by
the height of the block. For metals that are solid at room
temperature each of these elastic moduli are in the range of
1010 to 1011 Newtons/meter2.
There are only a limited number of ways to excite the elastic
properties of an object. We may squeeze or stretch it along one
or more directions, we may shear it as with a pair of shears, we
may bend it or we may twist it. That's it. Each to these
operations may be described in terms of compressive, tensile or
shear stress and strain. Squeezing is a straightforward
application of compressive stress. Stretching is a
straightforward application of tensile stress. Shearing is a
straightforward application of shear stress. Bending applies
compressive stress on the inside of the bend radius and tensile
stress on the outside. Twisting applies shear stress throughout
the region between torque applications. Evidently the forces
involved in landing this aircraft induced stresses that in some
places exceeded the elastic limit of the material since it did
not regain its shape after the stresses were removed.

Are there any questions?
|
 |
  Next Previous Other Next Previous Other
|


